The trajectory and point cloud are accurate in scales of about a few hundred meters. On larger scales, a slow drift can be observed. Every image contains on average about 5000 SIFT feature points of which only about 1000 are kept after refinement. In each frame, every camera has a mean of 1300 landmarks. Of these, only 20 % are considered good enough for triangulation.
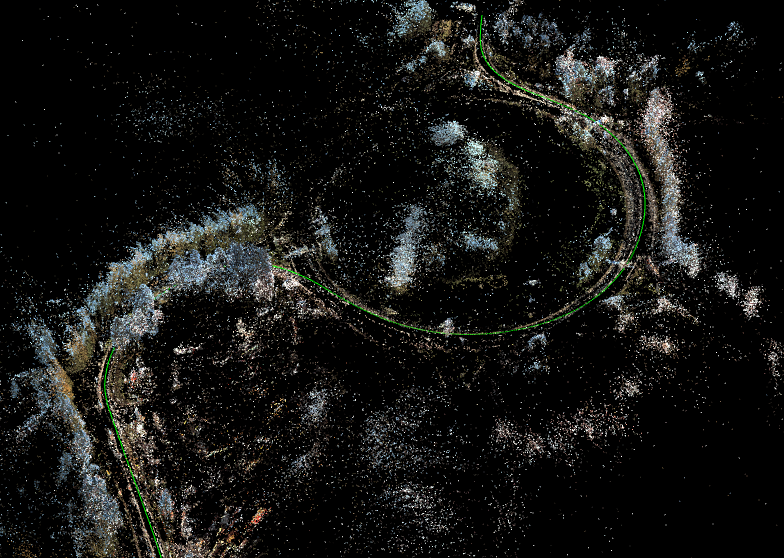
The image above shows the resulting trajectory and point cloud of Vallarondellen in Linköping.
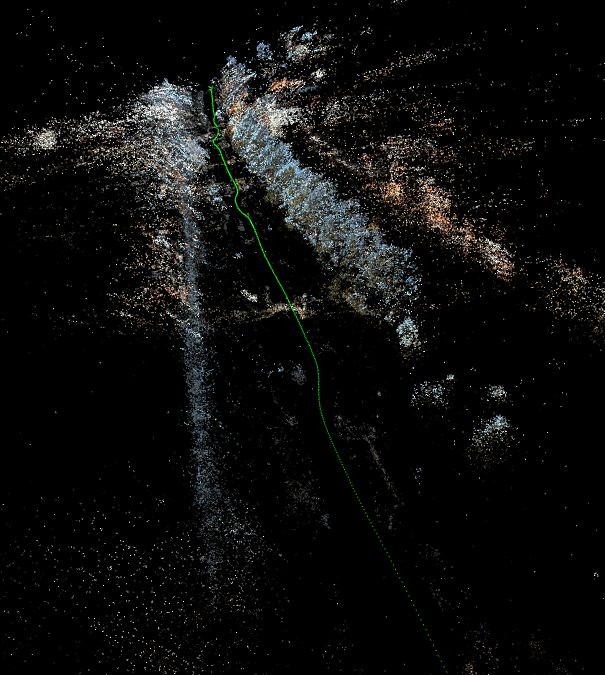
The above image shows a portion of Westmansgatan looking NW.
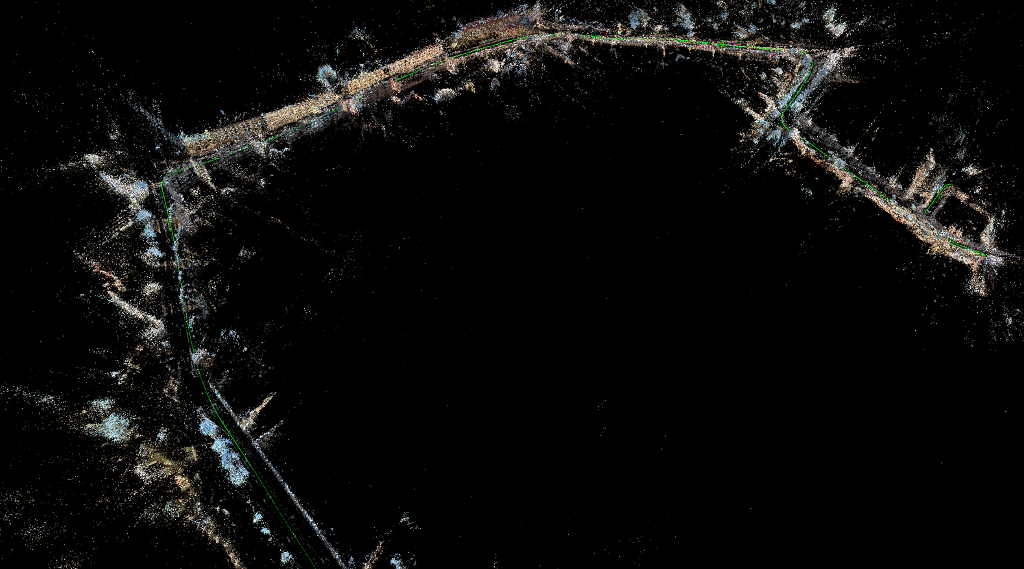
A birds eye view of Drottninggatan, Djurgårdsgatan, Kaserngatan and Drabantgatan. North is left in the image. The total distance driven in this image is approximately 1.8 km.