 LiU Homepage
LiU Homepage
TSEA81 - Datorteknik och realtidssystem
Notera att dessa sidor enbart finns i engelsk versionTSEA81 - Computer Engineering and Real-time Systems
Lecture - 6 - Real-time operating system
This lecture note treats the structure, and parts of the implementation, of a small real-time operating system, using Simple_OS for illustration of implementation aspects.
The notation [RT] refers to the book Realtidsprogrammering.
Task switch
There may be different reasons for a task switch to occur. A classification can be done, into two categories, depending on if a task switch is initiated from a task or from an interrupt handler.
A task switch initiated from a task occurs e.g. when a task shall wait a specified time interval and performs a call to a function for this purpose (e.g. si_wait_n_ms in Simple_OS), or when a task performs a Wait-operation on a semaphore having the value zero.
A task switch initiated from an interrupt handler occurs e.g. when a clock interrupt handler finds a task which has been waiting for a specified time interval, and the time interval has expired. This task is then made ready to run, and a task switch is initiated. Another example could be an interrupt handler which communicates with an external unit, e.g. a communication port, and which initiates a task switch when data that are intended for a specific task have arrived.
A task switch is performed by saving the current values of processor registers and program counter on the stack of the running task, and then restoring the corresponding values from the stack of the task which shall resume its execution.
A task switch can be performed when the task to be resumed has been selected. This is decided using the available method for task scheduling, e.g. priority based scheduling. The task switch can be thought of as being initiated by calling a function, denoted Schedule. This function performs the actual scheduling, e.g. by selecting the task with the highest priority among the tasks which are ready for execution.
A routine which performs the actual task switch is then called. This routine saves and restores information from the stacks of the two tasks that are involved in the task switch. The routine is denoted Context_Switch in Chapter 10 in [RT]. The Context_Switch routine uses the instructions of the processor, and is therefore implemented in assembly language, or using in-line assembly code.
A task switch initiated by a task can be described using graphical notation, as in Chapter 10 in [RT]. A task switch initiated by an interrupt handler will be described in more detail in Lecture Embedded Systems.
An illustration of the situation before the task switch is intiated is shown in Figure 1, where two tasks are shown, and one of these tasks is executing.
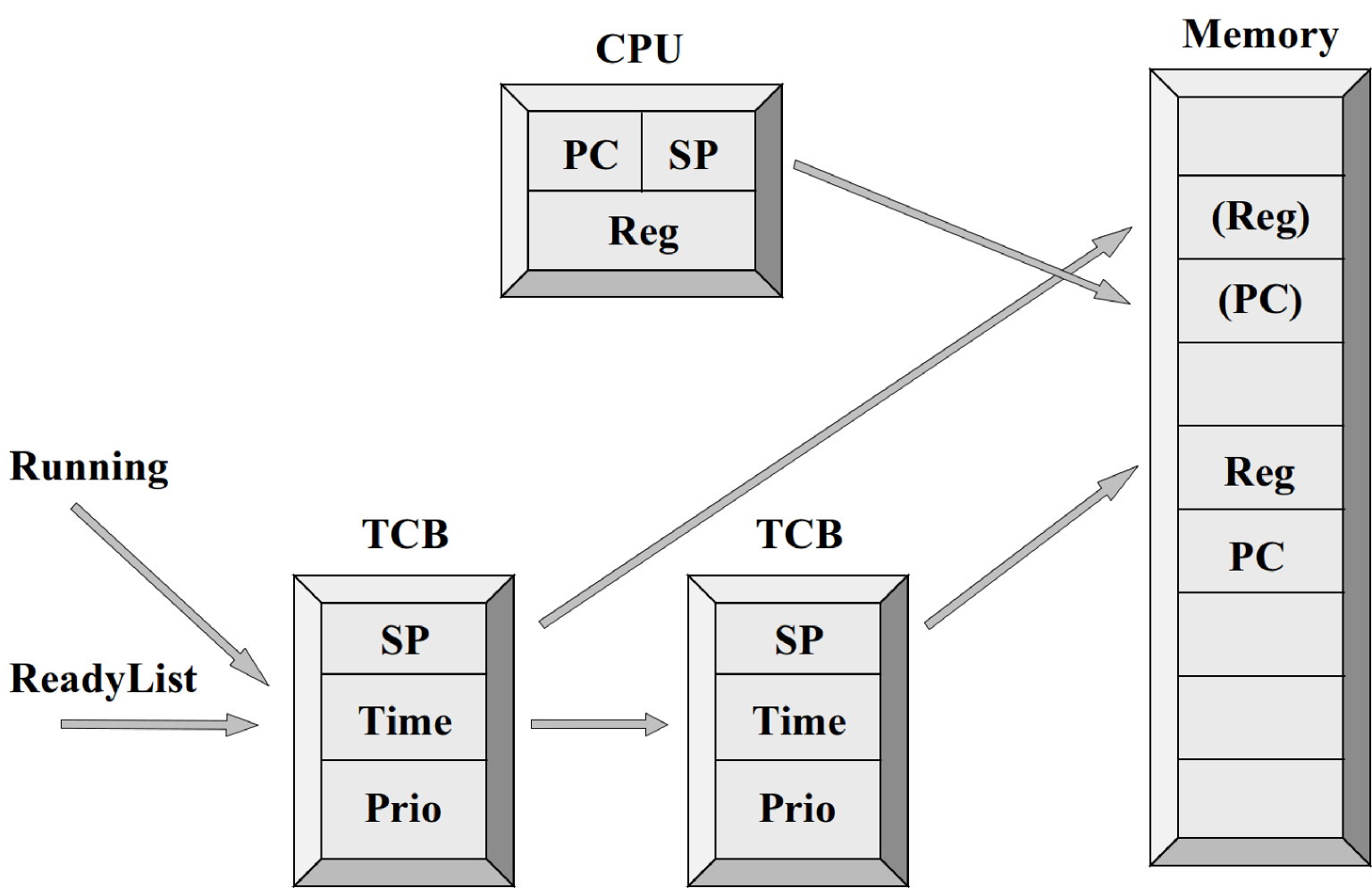
Figure 1. Two tasks, stored in the list of ready-to-run tasks. The task marked Running is executing.
Assume that the task switch is initiated by a call to a function resulting in the calling task waiting for a specified time, such as si_wait_n_ms in Simple_OS. As a first step, the TCB of the calling task, i.e. task currently running, is removed from the list of ready-to-run tasks and placed in a list of tasks waiting for time to expire. This situation is illustrated in Figure 2, where the two lists are denoted ReadyList and TimeList, and where the runnning task is marked by the word Running.
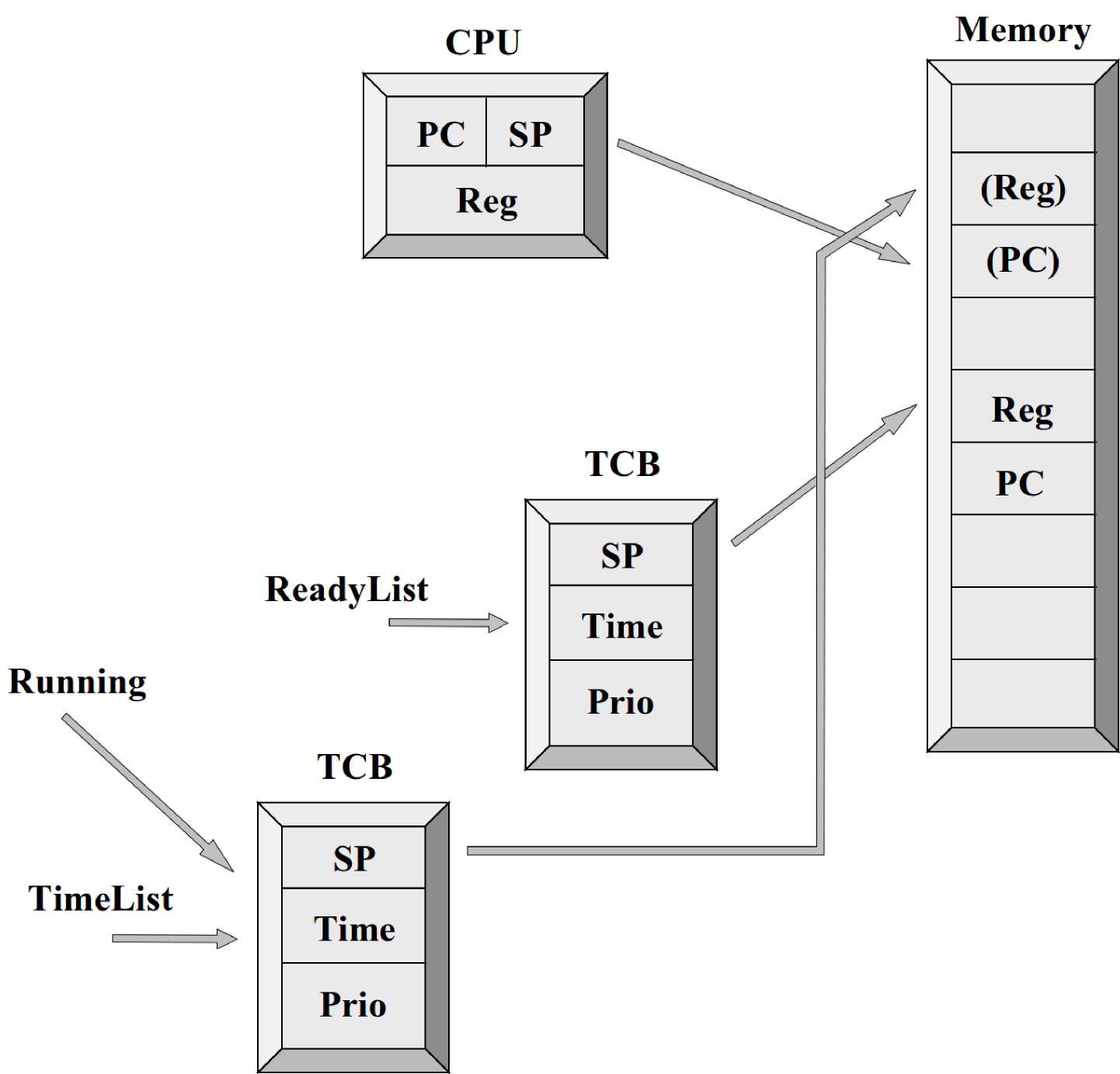
Figure 2. Two tasks, where the task marked Running is executing. The task control block of the executing task has been moved from ReadyList to TimeList, as a preparation for a task switch.
As a next step, the context of the running task is saved on the stack of the running task. This means that a value of the program counter, indicating the instruction from which the task shall resume its execution later, shall be stored on the stack, and also that the current values of the processor registers shall be stored on the stack. An illustration of the situation after this has been done is shown in Figure 3.
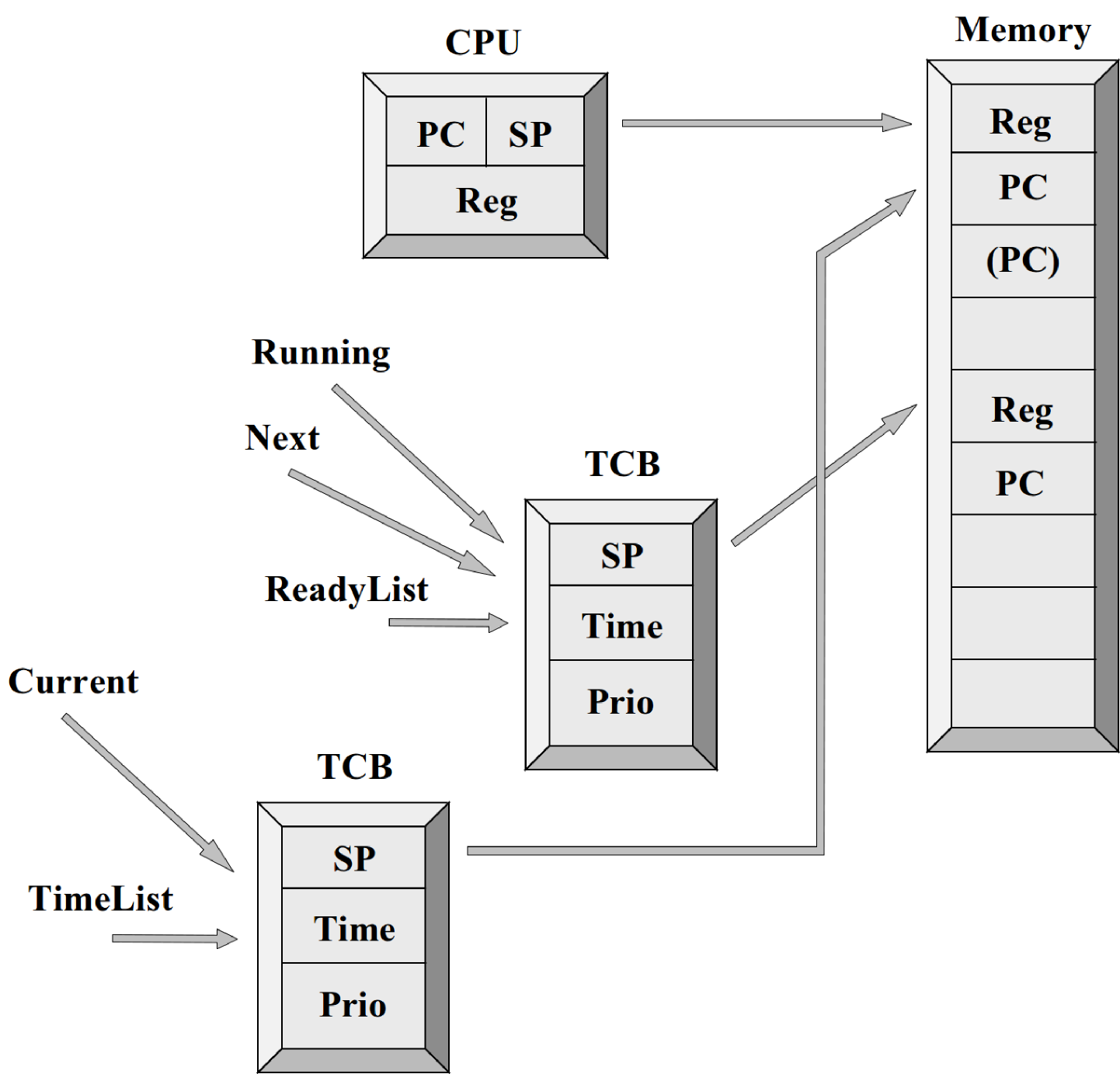
Figure 3. Two tasks, where the task marked Current is executing. Context for the running task has been saved, on the running task's stack.
As can be seen in Figure 3, the stack pointer in the CPU refers to the last stored element on the stack, while the stack pointer in the TCB refers to another location. The reason for this is that the stack pointer in the TCB has not yet been updated, and it still refers to the position in memory where the context of the task was saved, either during a previous task switch, or initially, when the task was created.
By setting the stack pointer in the TCB of the running task to refer to the same location as the CPU stack pointer, now pointing to the last stored element on the stack of the (still) running task, and after that, locating the TCB of the task to be resumed, the context switch can be performed. This is done by first setting the CPU stack pointer to the same value as the stack pointer in the TCB of the task to be resumed, giving a situation as shown in Figure 4, and then restoring values from this stack. When, as a last step, the program counter is restored, the task to be resumed restarts (or starts, if it is the first time it executes) its execution, a situation which is illustrated in Figure 5.
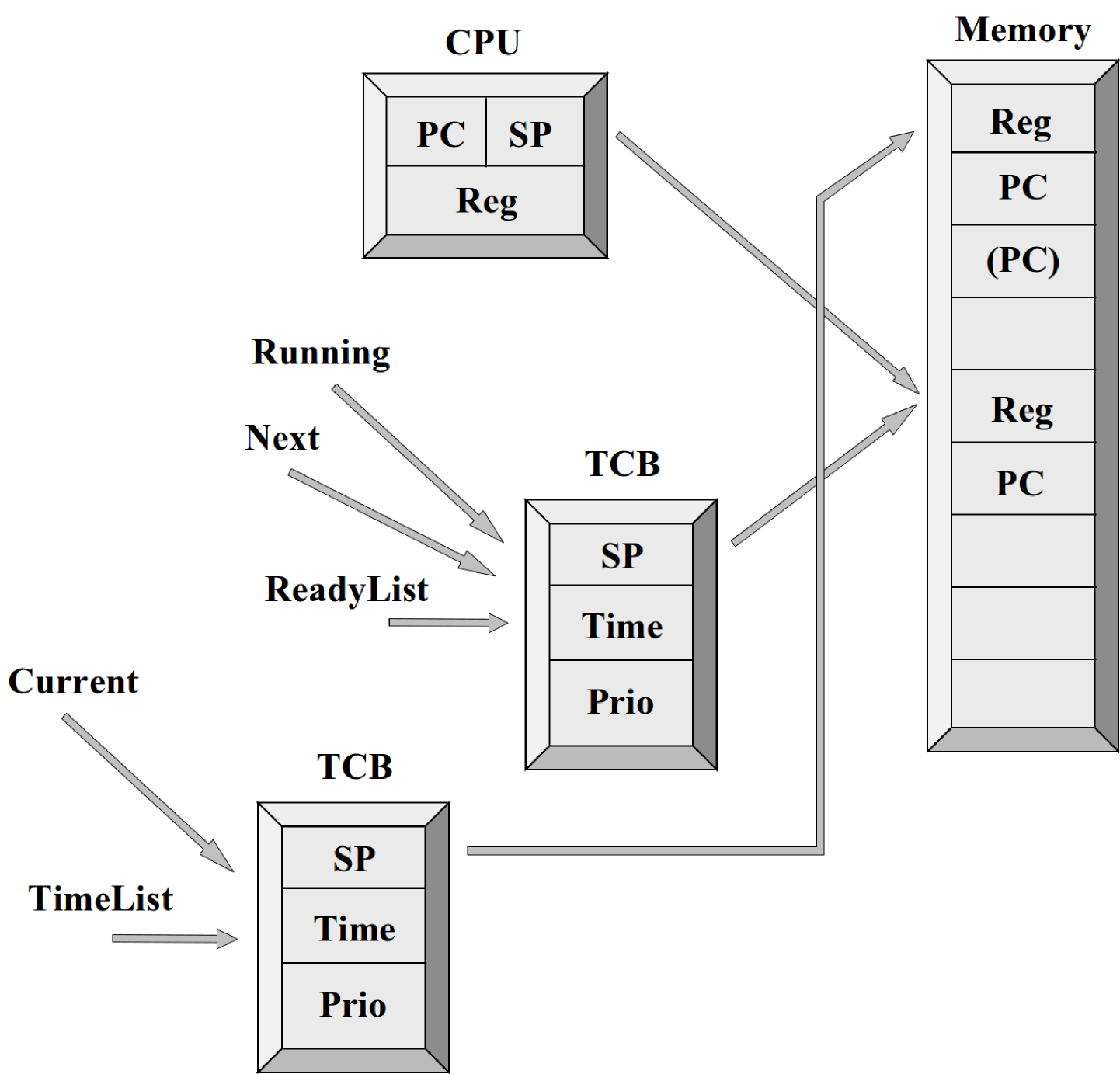
Figure 4. Two tasks, where the task marked Current is still executing. The task switch has been prepared, by setting the CPU stack pointer to refer to the saved context of the task marked Running, stored on the stack of the task marked Running.
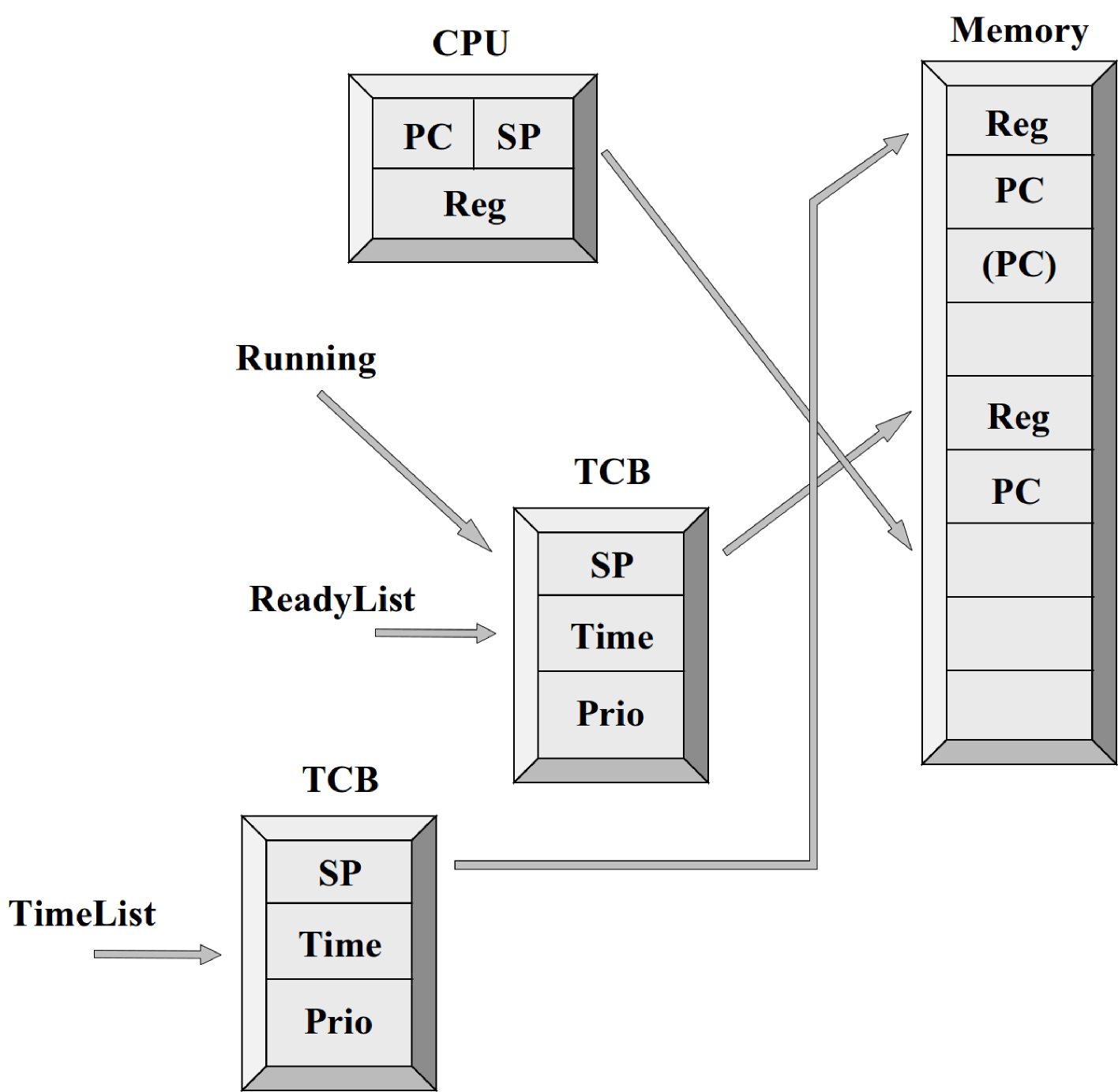
Figure 5. The task marked Running is now executing. The execution was started after the context of the task was restored, by restoring also the saved value of the program counter.
Task switch implementation
In Simple_OS, a task switch initiated by a task starts with the task calling the function schedule. This function is implemented in schedule.c, as
/* schedule: perform priority based scheduling */
void schedule(void)
{
/* task id for the running task */
int task_id_running;
/* task id for the task in ready list with
highest priority */
int task_id_highest_prio;
/* get task id for the running task */
task_id_running = task_get_task_id_running();
/* get task id for task in ready list with
highest priority */
task_id_highest_prio =
ready_list_get_task_id_highest_prio();
/* check if a task switch shall be performed */
if (task_id_highest_prio != task_id_running)
{
/* perform task switch */
task_switch(task_id_running, task_id_highest_prio);
}
else
{
return; /* no task switch */
}
}
The function schedule performs priority based scheduling, and is described in Section 15.2.3 in [RT]. The task switch, when running Simple_OS inside Linux or Windows, as is done in the Assignments in the course, is implemented as
void task_switch(int task_id_old, int task_id_new)
{
/* a pointer to the old stack pointer */
mem_address *old_stack_pointer;
/* the new stack pointer */
mem_address new_stack_pointer;
/* pointers to TCB for the two tasks */
task_control_block *old_tcb_ref;
task_control_block *new_tcb_ref;
/* get references to the TCBs */
old_tcb_ref = tcb_storage_get_tcb_ref(task_id_old);
new_tcb_ref = tcb_storage_get_tcb_ref(task_id_new);
/* set pointer to old stack pointer */
old_stack_pointer = &old_tcb_ref->stack_pointer;
/* set new stack pointer */
new_stack_pointer = new_tcb_ref->stack_pointer;
/* set Task_Id_Running to task id of new task */
Task_Id_Running = task_id_new;
/* do the task switch on the host */
context_switch(old_stack_pointer, new_stack_pointer);
Here we note that context_switch is implemented in assembly.
A task switch on a target, where Simple_OS runs as the operating system, as will be done in Lab 1 - Lift in an Embedded System, involves additional mechanisms, such as the use of software interrupt instead of a function call for starting a task switch initiated by a task, and also using architecture dependent mechanisms for handling context switches initiated by an interrupt handler. These mechanisms are described in more detail in Lecture Embedded Systems.
Clock interrupts
A clock interrupt is a periodic interrupt, which is used in a real-time kernel for the purpose of time handling. A typical task for the interrupt handler which is activated when a clock interrupt occurs, is to traverse the list of tasks waiting a specified time interval, decrement the TCB field which indicates the remaining waiting time, while at the same time checking which of these fields that are decremented to the value zero.
The tasks with TCBs where the time field is decremented to zero shall finish their waiting, and are therefore made ready for execution. A task switch is then initiated. When priority based scheduling is used, this means that if any of the tasks which were made ready for execution have a higher priority than the currently running task, i.e. the task which was interrupted by the clock interrupt, a task switch actually occurs.
When using Simple_OS together with Linux or Windows, which is the way Simple_OS is used in the assignments in this course, a clock interrupt is simulated using mechanisms available in Linux or Windows. When using Linux, a mechanism referred to as signals is used, and when using Windows, a mechanism referred to as multimedia interrupts is used.
When using Simple_OS as an independent real-time operating system, in an embedded system or on a PC, a real, periodic, interrupt is used. The frequency of the interrupt is set during start-up.
In Simple_OS, a clock interrupt leads to a call of the function tick_handler_function in the file tick_handler.c. This function traverses the list of tasks waiting for specified time intervals and decrements, in each TCB, the field where the remaining waiting time is stored. The tasks where this field is decremented to zero are then made ready for execution, by placing the tasks in the list of ready-to-run tasks. A task switch is then intiated, by a call to the schedule function.
Clock interrupts, and related aspects of time handling, e.g. functions for waiting a specified time interval or until a specified time instant, are described in Sections 15.3.1 and 15.4 in [RT].
Semaphores
A general implementation of semaphores can be done by first defining a data structure representing a semaphore. A data structure of this kind is referred to as a Semaphore Control Block, which is abbreviated SCB. The data structure contains two fields. One of the fields represents the value of the semaphore, and the other field is a list of TCBs for the tasks waiting on the semahore.
Three semaphore operations are needed: one operation for initialisation, a Wait-operation and a Signal-operation.
Section 10.6 in [RT] describes a general semaphore implementation. The semaphore data structure is described, and general descriptions of the operations are given.
There are situations where the actual semaphore implementation affects the execution of a real-time program. A situation of this kind occurs when a task with high priority repeatedly tries to reserve a shared resource which is protected by a semaphore, and where a task with low priority becomes waiting for the semaphore during a time interval when the task with high priority has reservered the resource. Section 10.6.1 in [RT] describes how the execution in this situation is affected by the actual semaphore implementation.
One should note that the implementations described in Section 10.6.1 affect a specific situation, and that they do not affect other properties of the semaphores, e.g. that they can be used to ensure mutual exclusion.
An example of literature where different types of semaphores are discussed is the article The Well-Tempered Semaphore: Theme With Variations, by Kenneth A. Reek.
In Simple_OS, semaphores are implemented using an SCB defined in si_semaphore.h, as
typedef struct
{
/* the list of waiting processes */
int wait_list[WAIT_LIST_SIZE];
/* semaphore value */
int counter;
} si_semaphore;
An operation for initialisation is defined by the function si_sem_init, implemented as
/* si_sem_init: intialisation of semaphore sem */
void si_sem_init(si_semaphore *sem, int init_val)
{
wait_list_reset(sem->wait_list, WAIT_LIST_SIZE);
sem->counter = init_val;
}
The function si_sem_wait implements a Wait-operation, as
/* si_sem_wait: wait operation on semaphore sem */
void si_sem_wait(si_semaphore *sem)
{
/* task id */
int task_id;
/* disable interrupts */
DISABLE_INTERRUPTS;
/* check counter */
if (sem->counter > 0)
{
/* decrement */
sem->counter--;
}
else
{
/* get task_id of running task */
task_id = task_get_task_id_running();
/* remove it from ready list */
ready_list_remove(task_id);
/* insert it into the semaphore waiting list */
wait_list_insert(
sem->wait_list, WAIT_LIST_SIZE, task_id);
/* call schedule */
schedule();
}
/* enable interrupts */
ENABLE_INTERRUPTS;
}
and the function si_sem_signal implements a Signal-operation, as
/* si_sem_signal: signal operation on semaphore sem */
void si_sem_signal(si_semaphore *sem)
{
/* task id */
int task_id;
/* disable interrupts */
DISABLE_INTERRUPTS;
/* check if tasks are waiting */
if (!wait_list_is_empty(
sem->wait_list, WAIT_LIST_SIZE))
{
/* get task_id with highest priority */
task_id = wait_list_remove_highest_prio(
sem->wait_list, WAIT_LIST_SIZE);
/* make this task ready to run */
ready_list_insert(task_id);
/* call schedule */
schedule();
}
else
{
/* increment counter */
sem->counter++;
}
/* enable interrupts */
ENABLE_INTERRUPTS;
}
Semaphores with time-out
Sometimes it is desirable to limit the maximal waiting time when a task waits on a semaphore. One reason could be that the task which performs the Wait-operation is not allowed to wait more than a specified amount of time, e.g. due to safety requirements. A limitation of the waiting time can be achieved, using semaphores with time-out, where the maximum waiting time can be given as an extra parameter in the function implementing the Wait-operation. The parameter denotes the maximum waiting time expressed e.g. in milliseconds.
A general implementation of semaphores with time-out is described in Section 10.6.2 in [RT].
Condition variables
A general implementation of condition variables can be performed, starting with a data structure for representation of a condition variable. The data structure, which is referred to as Event Control Block (abbreviated ECB), contains two fields.
One field is a reference to the semaphore which is associated with the condition variable, and the other field is a list of TCBs for tasks waiting on the condition variable.
Three operations are needed for a condition variable: one operation for initialisation, an Await-operation and a Cause-operation.
Section 10.7 in [RT] describes a general implementation of condition variables. The data structure for condition variables is described, and general descriptions for the operations are given.
Condition variables are implemented in Simple_OS, in the files si_condvar.h and si_condvar.c.
Message passing
Functionality for message passing is implemented in Simple_OS. There are functions for sending and receiving messages. A message is sent by calling the function si_message_send. The task identity of the receiving task is given as a parameter to si_message_send.
A message is sent as an array of bytes, which is copied from the sending task to the receiving task. The message is stored in a message buffer, which is associated with the receiving task. When a receiving task calls si_message_receive, it copies a message from its message buffer to an array which is given as a parameter to si_message_receive.
If the message buffer for a task is empty when the task calls si_message_receive, the task blocks.
If the message buffer for a receiving task is full when a sending task calls si_message_receive with the task id of the receiving task as parameter, the sending task blocks.
The functions si_message_send and si_message_receive are implemented in the source file si_message.c. The message buffer functionality is implemented in tcb_message.c. The data structure for a message buffer can be seen in the file tcb_message.h.
Informationsansvarig: Kent Palmkvist
Senast uppdaterad: 2017-10-13
