Om bandvagnen
Systemets olika delar
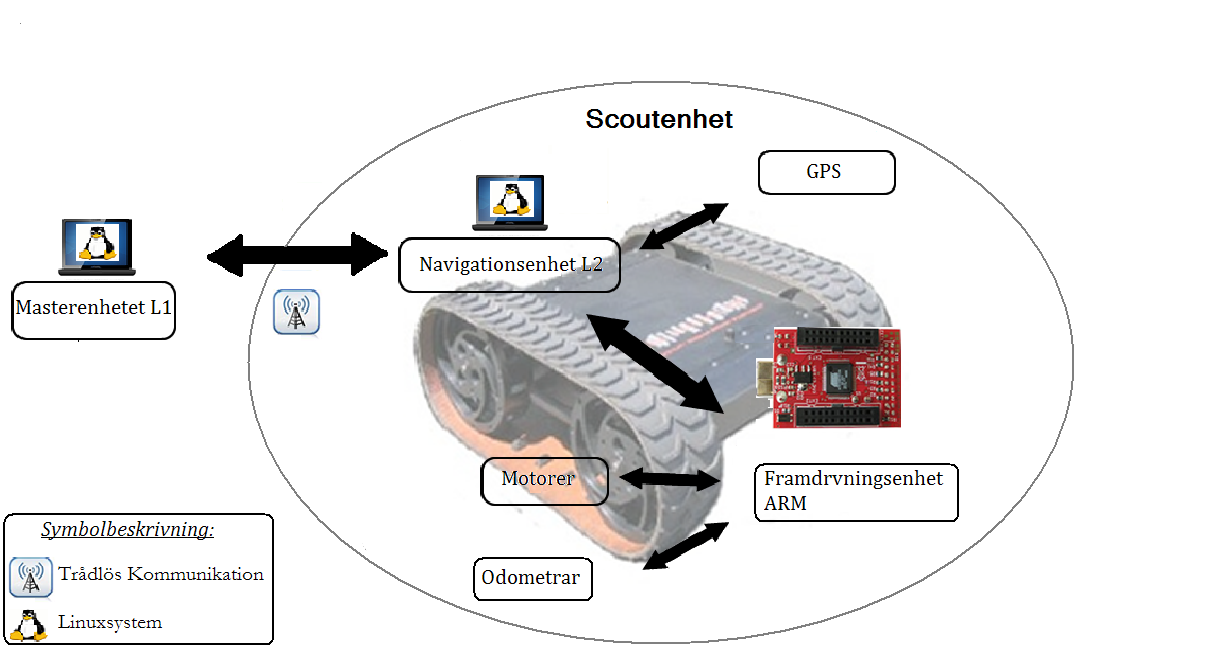 Översiktsbild av systemet
Översiktsbild av systemet
Masterenheten
Masterenhetens främsta uppgift är att möjliggöra för användaren att styra bandvagnen med hjälp av ett grafiskt användargränssnytt. Styrningen ska kunna göras såväl manuellt som autonomt . I manuellt läge ska användaren kunna ge kommandon som fram/bak körning, vänster/höger rotation och stanna. Innan bandvagnen kan köras i autonomt läge ska man ange en brytpunktsbana i användargränssnitet.
Navigationsenhet L2
Navigationsenheten består av en laptop som sitter på bandvagnschassit. Enheten har tre huvudsakliga uppgifter. Den första är att sköta kommunikationen mellan masterenheten och scoutenheten. Den andra är att beräkna styrsignaler till framdrivningsenheten utifrån nuvarande position, orientering,hastighet och önskad position. Den tredje är att samla in sensordata och tidsmärka den.
Framdrivningsenheten
Framdrivningsenheten består av ett utvecklingskort och två odometrar vilka är anslutna till motorer. Den har till uppgift att sköta regleringen av motorerna utifrån önskad hastighet.
GPS
GPS används till positionsskattningen tillsammans med odometerdata. Dess koordinater används till utritning av brytpunktsbanan i GUI:t.
Användargränssnittet
Den enhet som användaren främst kommer i kontakt med är Masterenheten. I Masterenheten finns ett grafiskt användargränssnitt, GUI:t, via vilket användaren kan styra och övervaka bandvagnen. Det finns möjlighet att välja tre olika lägen i GUI:t.
Det första är manuellt läge. Där finns möjlighet för användaren att påverka bandvagnens position och hastighet. Positionen ändras med piltangenterna. Hastigheten kan däremot ändras med antigen hastighetsslidern eller tangenterna W och S. Med tangenten W ökas hastigeten och med S sänks den. I gränssnittet presenteras även sensordata från GPS och odometrarna. I respektive sensorflik återfinns olika sensordata. Eftersom projektet ska vidareutvecklas av andra studenter där IMU och kamera ska ingå finns även dessa sensorflikar representerade.
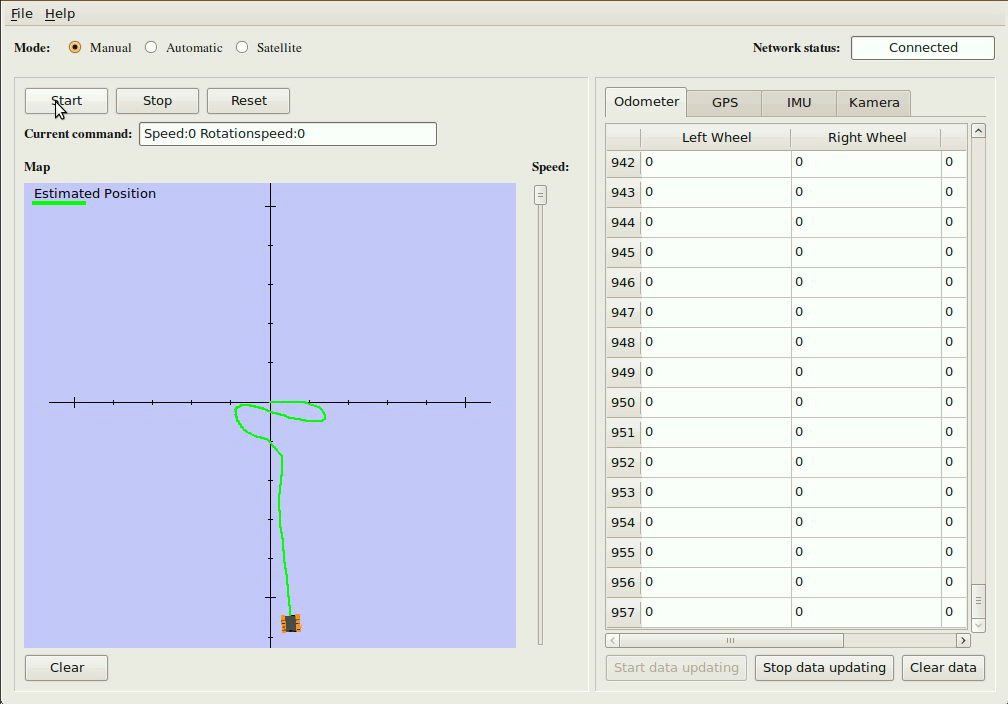 Manuellt läge
Manuellt läge
Det andra möjliga läget är autonomt. För att kunna köra i autonomt läge måste man välja bandvagnens brytpunktsbana. Det kan göras på två sätt. Antingen skapar man en bana eller väljer en fördefinierad. Väljer man att skapa en brytpunktsbana finns det dessutom möjlighet att spara densamma för senare bruk. När banan är vald skickas den till Scoutenheten. Användaren väljer själv den information som ska presenteras i GUI:t. Informationen som kan visas är bland annat bandvagnens och/eller brytpunktsbanans position på kartan, bandvagnens vinkelhastighet m.m. För start av autonomt navigering trycker man på startknappen.
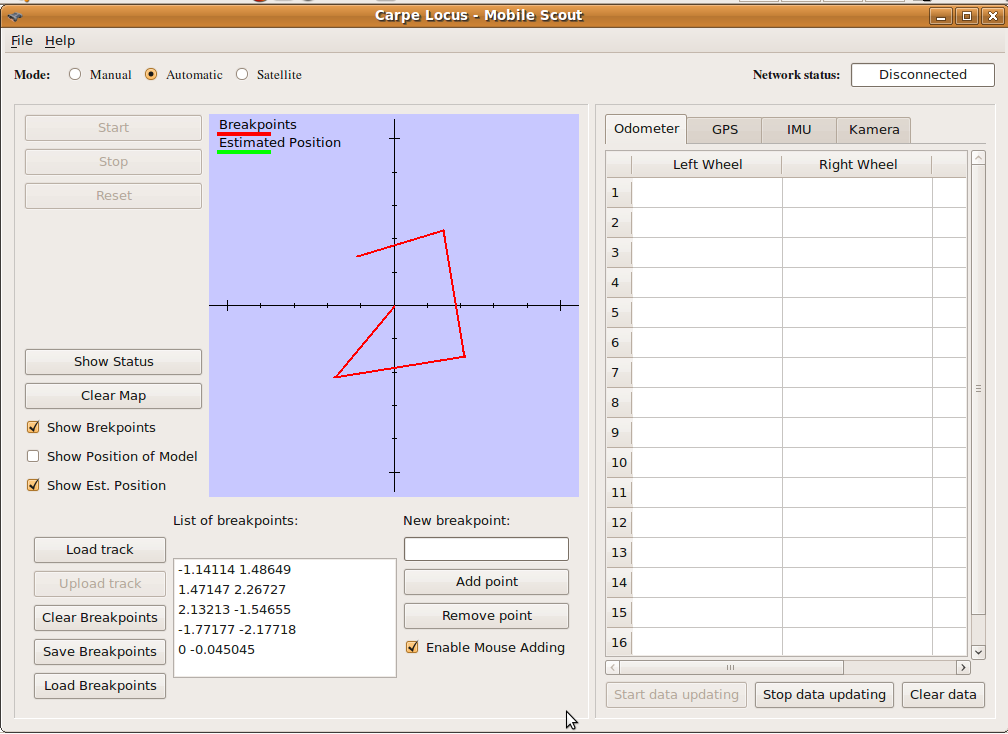 Autonomt läge
Autonomt läge
Det sista körläget kallas för satellitläget. I detta läge ges möjligheten att visa en satellitkarta över ett område. Innan man väljer brytpunktsbanan kan man förflytta sig på samt zooma i satelitkartan. Här ges möjlighet att presentera GPS-data på kartan tillsammans med bandvagnens position. I bilden nedan tilldelas GPS:en gula punkter och bandvagnens körsträcka markeras med ljusgrönt spår.
 Satellitläge
Satellitläge