
Hem
|
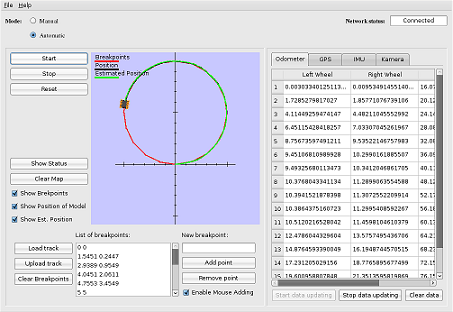
I CDIO-kursen “Reglerteknisk projektkurs” vid Linköpings universitet våren 2009 har ett program utvecklats för att hantera en robot av typen MMP30. Systemet består av två delar, en scoutenhet och en masterenhet. Scoutenheten är en dator som representerar en terränggående robot med hjälp av olika modeller. En operatör kan styra och bevaka scoutenheten då den befinner sig i manuellt eller autonomt läge via masterenhet som också är en dator. Kommunikationen mellan dessa enheter sker via en trådlös länk. Modellerna på scoutenheten består av en modell för själva roboten och dess uppförande samt modeller för olika sensorer som ska finnas på den fysiska roboten, tex IMU, GPS, odometer och kamera. Data från dessa modeller kan skickas från scoutenheten till mastern för att operatören ska ha en möjlighet att avläsa hur roboten rör sig. |

|
|
Under projektets gång har bland annat ett användargränssnitt utvecklats för att ge möjlighet till att styra roboten. |