Beskrivning av produkten
Problemet låg i att landa en autonom helikopter på t ex ett fartyg som färdas i en viss hastighet.
Med hjälp av en rörlig plattform som kan reglera sin lutning och justera vinklarna efter helikopterns orientering kunde fartygets rörelser i viss mån kompenseras för. Helikoptern fick sedan kompensera för de rörelser i position som plattformen fick.
De ingående systemen i problemet var:
- Fartyg
- Plattform
- Helikopter
- Samverkande regulator
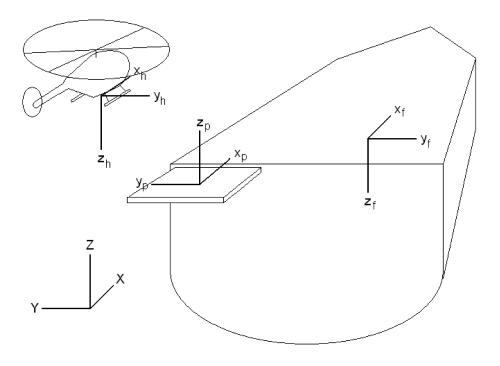
Koordinatsystem
Olika koordinatsystem infördes för de olika delsystemen.
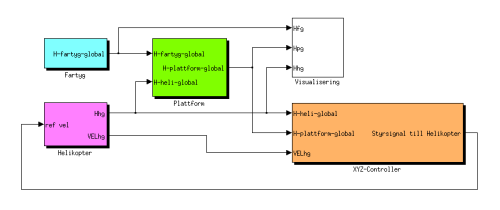
Simulinkmodell
Position och vinklar skickades mellan delsystemen som homogena transformer. Bilden är simulinkschemat på högsta nivån och visar kopplingarna mellan delsystemen.
Fargygsmodell
Genom att låta multi-sin-funktioner styra fartygets tipp- och roll-rörelser erhölls en tillräckligt bra modell för ändamålet. Rörelserna matchades mot mätningar på ett riktigt fartyg.
Plattformsmodell
En enkel plattformsmodell implementerades efter en verklig modell. Denna styrdes med tipp- och rollutslag och reglerades med PID-regulatorer i vardera led. Plattformen gavs sedan helikopterns orientering, i form av tipp- och rollvinklar, som referens.
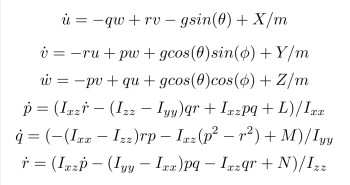
Helikoptermodell
Helikoptermodellen som användes var en modell för en medelstor RC-helikopter. Denna reglerades med LQ-regulator och byggdes för att ta hastigheter som referenssignal. Referenssignalen för helikoptern var den som kalkylerats av den samverkande regulatorn.
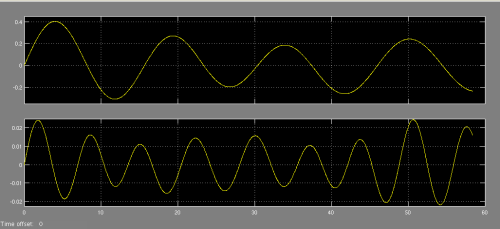
Samverkande reglering
Regleringen delades upp i 2 fall. Det första fallet, kallat 'det enkla fallet', innebar att fartygets rörelser är så pass långsamma att helikoptern kan följa med utan problem. I det andra fallet, 'det svåra fallet', är fartygets rörelser snabba i förhållande till helikopterns dynamik. Ett analys-block gjordes i simulink som gav frekvenser och andra data på fartygets rörelser.
För det enkla fallet kunde fårhållandevis enkel reglering användas, som först reglerade helikoptern rätt i position i xy-planet och sedan försiktigt minimerade avståndet i z-led.
För det svåra fallet byggdes en mer avancerad regulator som tog in data från analysblocket för att göra beslut om reglering. Regulatorn försökte nu istället placera helikoptern strax ovanför det predikterade övre vändläget för plattformen. Om vissa bivillkor för position, relativa hastigheter med mera var uppfyllda när plattformen nådde sitt övre vändläge satte regulatorn ner helikoptern på plattformen.