|
Projektet utfördes tillsammans
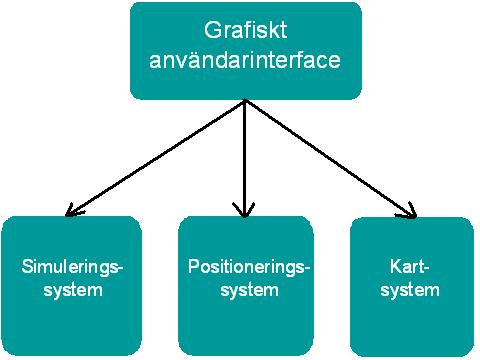
med Saab Underwater systems (SUS) och hade till syfte att ta fram en grafisk
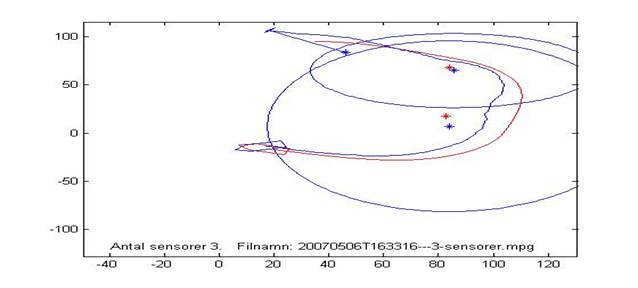
simuleringsmiljö i Matlab för autopositionering av undervattenssensorer Ett
motsvarande system skulle i verkligheten kunna, med vissa mindre
modifieringar, användas för mċlföljning av t.ex. fientliga vattenfarkoster i
en hamn eller i ett sund.
|