Aktiv Avvägning av AUV
| Projektet | ||
Projektbeskrivning | ||
Moduler
|
||
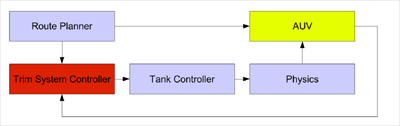
| Vid projektets början fick vi en simulinkmodell av en AUV från SUS. Vi utökade den med ett antal moduler. De övriga modulerna har utvecklats separat och här följer en kort beskrivning av dem. | ||
| AUV Denna modul var given från SUS. AUV-blocket innehåller en fysisk modell av AUV:n samt en autopilot som styr roderutslagen |
||
| Physics Physics tar in vattenmängd och dess densitet från Tank Controller och uppdaterar AUV:n med avseende på tyngdpunkt, masströghet med mera |
||
| Tank ControllerTank Controller tar in referensvärden och modellerar vattenmängd i tankarna som en funktion av pumphastighet samt att den lägger in begränsningar så att man inte kan spränga tankarna. | ||
| Route Planner Route Planner är i huvudsak ett testverktyg där man kan lägga upp en rutt och förändra massan på AUV:n under gång | ||
| Trim System Controller I
Trim System Controller sitter regulatorn som ställer ut vattenvolymer
som driver felavvägningen mot noll. Under projektets gång har vi
arbetat med ett stort antal olika reglermetoder såsom: Men vilka vi använde i den slutgiltiga lösningen är hemligt. |
||