Introduktion
Målet med detta projekt är att utveckla en industrirobots förmåga att spela golf. Tidigare projekt har gjort en robot som hade någorlunda bra träffsäkerhet. Det här projektet utfördes våren 2005 och omfattade totalt 1400 timmars arbete. Projektet har till detta år utökats med en kamera och en green.
Bland de saker som utvecklats finns en fullt fungerande bollsimulation, ett interface för en firewirekamera i Matlab, bildbehandlingsalgoritmer för kalibrering och bollbanedetektering, ett säkert och robust robotkontrollprogram, samt ett säkert och interaktivt användargränssnitt.
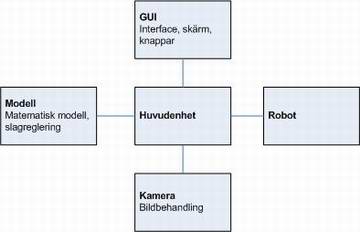
Översikt
Systemet består av fem moduler med huvudenheten i centrum. Från denna sköts och styrs kommunikationen mellan roboten, modellen, kameran och GUI:t.
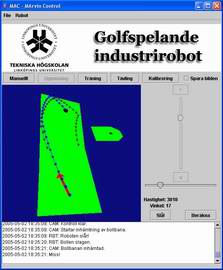
Användargränssnitt
Hela systemet styrs från det grafiska användargränssnittet.
Här väljs någon av moderna tävling, uppvisning, träning eller manuell mod. Bilden visar systemet i manuell mod, där användaren får ange riktning och hastighet på robotens slag.
Den predikterade bollbanan från den matematiska modellen kan plottas (blå plott).
Kameran detekterar sedan bollens verkliga bana och plottar den (svart plott).
Den detekterade bollbanan är underlaget till slagreglering vi eventuell miss. Slagreglering kan ske i tävlingsmod och uppvisningsmod. Själva bilden på banan kan roteras, flyttas och förstoras med musrörelser.
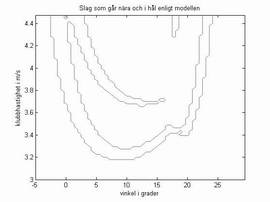
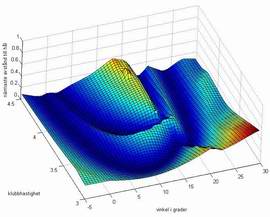
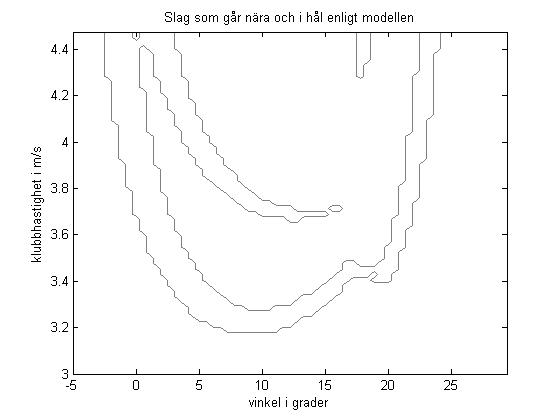
Underlag för given klubbhastighet
Den tredimensionella plotten visar den närmsta punkten till hålet för flera olika vinklar och hastigheter. För att bestämma rätt utslagshastighet på bollen utgår man från en bestämd vinkel, sedan söker simulatorn av de olika hastigheterna och väljer den hastighet som ger kortast (simulerat) avstånd till centrum på hålet. För vissa vinklar finns det två olika hastigheter som går i hål, dels en utan studs i väggen, dels en med studs. Dessa fall syns tydligare i en högra figuren.
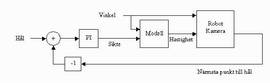
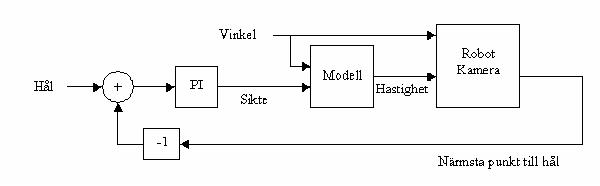
Slagreglering
När roboten slår sitt första slag, siktar den givetvis på hålet. Vid en eventuell miss ser roboten med hjälp av kameran hur nära hålet han slog. Genom att bilda felet kan ett nytt sikte beräknas med en PI-regulator. På detta sätt kan missar som beror av modellfel korrigeras på ett effektivt sätt.

Bildbehandling
När en bollsekvens ska hämtas in, slås kameran på och bilderna hämtas in, via kamerainterfacet, till Matlab. Där maskas de ointressanta delarna av bilden bort (för att snabba upp algoritmen) innan bollen detekteras.