Syftet med detta projekt är att vidareutveckla en ROV med ett robust reglersystem, samt införa nya sensorer för navigering för att komma närmare en helt autonom farkost. Projektet, som är en påbyggnad från tidigare års projekt där den fysiska konstruktionen av farkosten, modell, simuleringsverktyg samt viss reglering tagits fram, genomförs på Instutitionen för Systemteknik (ISY) på Linköpings Universitet (LiU) i samarbete med Saab Underwater Systems och Institutionen för Ekonomisk och Industriell utveckling (IEI).
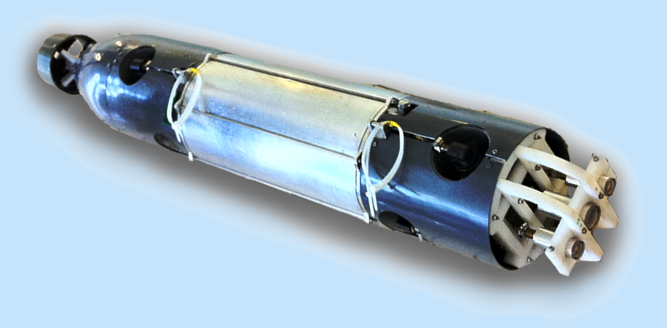
Plattformen som vidareutvecklas är designad och konstruerad på LiTH och består av en ca 1.5 m lång torpedliknande ubåt, utrustad med styrsystem och sensorer. Ett långsiktigt mål med projektet är tt delta i SAUC-E tävlingen som årligen hålls för AUV:er i studentprojekt.