

Kort om projektet
Hemsidan skapades i samband med projektet "Optimal styrning av radiostyrd racerbil" som är ett CDIO-projekt i kursen "Reglerteknisk projektkurs" på Linköpings Tekniska Högskola.
Projektet är en vidareutveckling på ett sedan tidigare existerande system som har utvecklats av ett liknande projekt.
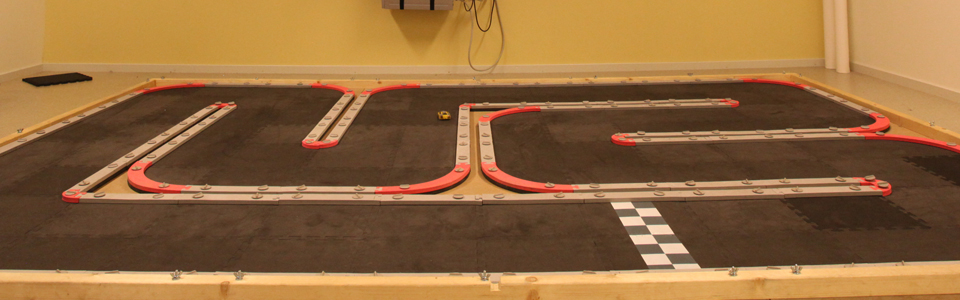
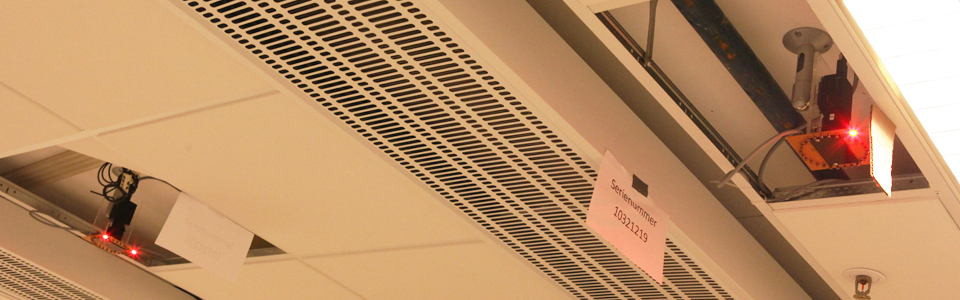
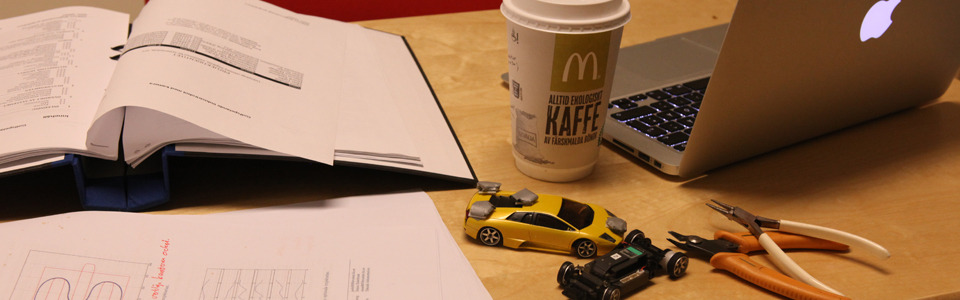
Systemet består av en bana med tillhörande radiostyrda bilar, IR-kameror i taket och hårdvara för att styra bilarna autonomt.
Syftet är att vidareutveckla systemet, i avseende på modellering, optimering och reglering, och utvärdera vad den befintliga
hårdvaran klarar av att prestera i form av varvtider och robusthet.
Målet är att efter avslutat projekt ha ett robust och stabilt system, som autonomt styr bilarna runt banan på snabbast möjliga tid.
Den optimala trajektorian ska beräknas (offline), i avseende att minimera varvtiden, där de fysikaliska begränsningarna, t ex i form
av tillgänglig friktion och effekt hos bilarna, utnyttjas i så stor utsträckning som tillåts. Systemet ska sedan autonomt styra bilarna längs
denna optimala trajektoria, med kontinuitet i varvtider.